
Who we are
Ambulight Corp cloud service provider for real-time vehicle tracking and traffic signal-changing solutions based in Germany. We serve our government and B2B customers with a holistic cloud tracking architecture system, equipped with smarter connected IoT devices for more accurate detection and signal-changing performance.
Vision
Our Vision is to create a safer, smarter, and more reliable traffic system that connects to the roads around the world, mainly focussing on city traffic.
Mission
To minimize traffic issues and accidents by utilizing smart and innovative technology solutions.
Value proposition
Our ambulance tracking system with a connected traffic signal-changing solution can reduce delays paramedics face in traffic and supports hospitals in their mission to save people’s lives quickly.
Problem Statement
Paramedics have faced the traffic issue of delivering the emergency patients during peak hours, which has delayed their journey time back and forth the pick-up points and hospitals. This seriously threatens patients’ lives. Currently, paramedics would need to wait for civilian drivers to clear out the road in order for them to get through.

Solution
Prototyping
To solve this issue, we came up with a technological solution by integrating an ambulance tracking system with traffic light signals. This could help to reduce the ambulance delay issue and save more patients’ lives. Furthermore, it would benefit the government by reducing the accident rate derived from ambulance crashes and it could enhance the image of the healthcare system.

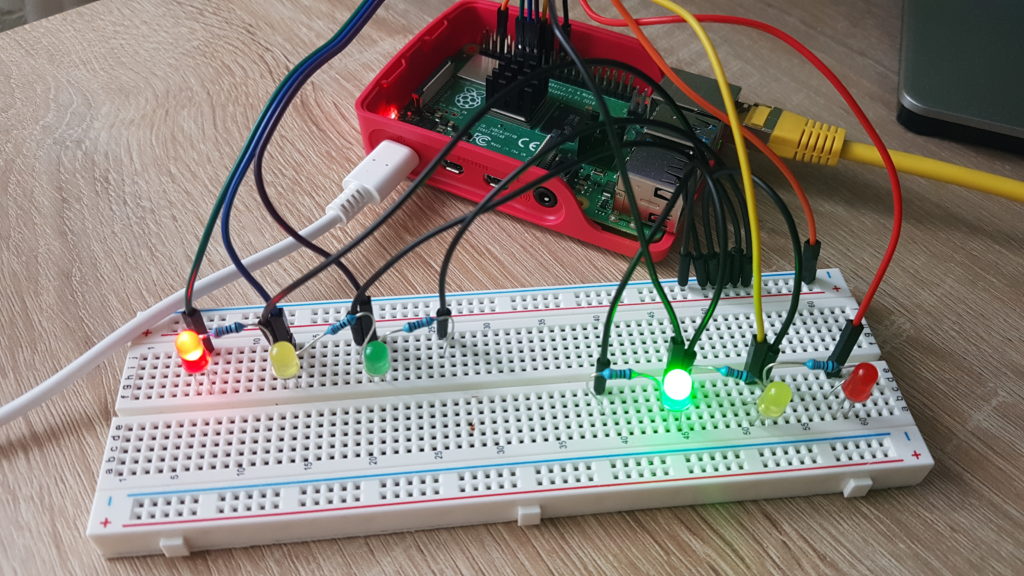
After refining our basic concept, we designed a prototype with a Raspberry Pi and LEDs and worked with Bluetooth signals instead of GPS.
The Code
import RPi.GPIO as GPIO
import time
import bluetooth
signal_vorhanden = False
nearby_devices = []
RED_PIN = 17
YELLOW_PIN = 27
GREEN_PIN = 22
RED_PIN2 = 24
YELLOW_PIN2 = 23
GREEN_PIN2 = 25
addr = "ADRESSE"
GPIO.setmode(GPIO.BCM)
GPIO.setup(RED_PIN, GPIO.OUT)
GPIO.setup(YELLOW_PIN, GPIO.OUT)
GPIO.setup(GREEN_PIN, GPIO.OUT)
GPIO.setup(RED_PIN2, GPIO.OUT)
GPIO.setup(YELLOW_PIN2, GPIO.OUT)
GPIO.setup(GREEN_PIN2, GPIO.OUT)
GPIO.output(RED_PIN, GPIO.HIGH)
GPIO.output(GREEN_PIN2, GPIO.HIGH)
def ampelschalten_rotzugruen():
global signal_vorhanden
GPIO.output(YELLOW_PIN, GPIO.HIGH)
time.sleep(2)
GPIO.output(YELLOW_PIN, GPIO.LOW)
GPIO.output(RED_PIN, GPIO.LOW)
GPIO.output(GREEN_PIN, GPIO.HIGH)
signal_vorhanden = True
def ampelschalten_gruenzurot():
global signal_vorhanden
GPIO.output(GREEN_PIN, GPIO.LOW)
GPIO.output(YELLOW_PIN, GPIO.HIGH)
time.sleep(2)
GPIO.output(YELLOW_PIN, GPIO.LOW)
GPIO.output(RED_PIN, GPIO.HIGH)
signal_vorhanden = False
def checksignal():
global nearby_devices
global signal_vorhanden
nearby_devices = bluetooth.discover_devices(lookup_names=False)
print(nearby_devices)
if addr in nearby_devices and signal_vorhanden == False:
ampel2gruenrot()
time.sleep(1)
ampelschalten_rotzugruen()
time.sleep(0.1)
elif addr in nearby_devices and signal_vorhanden == True:
pass
elif addr not in nearby_devices and signal_vorhanden == True:
ampelschalten_gruenzurot()
time.sleep(1)
ampel2rotgruen()
elif addr not in nearby_devices and signal_vorhanden == False:
pass
def ampel2rotgruen():
GPIO.output(YELLOW_PIN2, GPIO.HIGH)
time.sleep(2)
GPIO.output(YELLOW_PIN2, GPIO.LOW)
GPIO.output(RED_PIN2, GPIO.LOW)
GPIO.output(GREEN_PIN2, GPIO.HIGH)
def ampel2gruenrot():
GPIO.output(GREEN_PIN2, GPIO.LOW)
GPIO.output(YELLOW_PIN2, GPIO.HIGH)
time.sleep(2)
GPIO.output(YELLOW_PIN2, GPIO.LOW)
GPIO.output(RED_PIN2, GPIO.HIGH)
def closeprogram():
GPIO.output(GREEN_PIN, GPIO.LOW)
GPIO.output(YELLOW_PIN, GPIO.LOW)
GPIO.output(RED_PIN, GPIO.LOW)
GPIO.output(GREEN_PIN2, GPIO.LOW)
GPIO.output(YELLOW_PIN2, GPIO.LOW)
GPIO.output(RED_PIN2, GPIO.LOW)
time.sleep(0.1)
GPIO.cleanup()
time.sleep(0.1)
while True:
try:
checksignal()
except KeyboardInterrupt:
closeprogram()
break